Une équipe de recherche dirigée par le professeur Hwangbo Jemin du département de génie mécanique du KAIST a mis au point une technologie de commande de robot quadrupède capable de marcher avec robustesse et agilité même sur un terrain déformable tel qu'une plage de sable.
L'équipe de recherche du professeur Hwangbo a mis au point une technologie permettant de modéliser la force reçue par un robot marcheur sur le sol constitué de matériaux granulaires tels que le sable et l'a simulé par l'intermédiaire d'un robot quadrupède. L'équipe a également travaillé sur une structure de réseau neuronal artificiel capable de prendre des décisions en temps réel pour s'adapter à différents types de surfaces sans information préalable tout en marchant et l'a appliquée à l'apprentissage par renforcement.
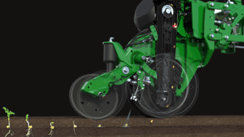
Le contrôleur à réseau neuronal entraîné devrait élargir le champ d'action des robots marcheurs quadrupèdes en prouvant sa robustesse sur des terrains changeants, notamment sa capacité à se déplacer à grande vitesse même sur une plage de sable et à marcher et tourner sur des sols mous comme un matelas pneumatique sans perdre l'équilibre.
Cette recherche, dont le premier auteur est Soo-Young Choi, étudiante en doctorat au département de génie mécanique du KAIST, a été publiée en janvier dans la revue Science Robotiqueintitulée "Apprendre la locomotion quadrupède sur un terrain déformable".