
Latest Industry News

ANCA Motion AM619-1-03-0009 3-Phase AC Servo Drive –...
To see ERD's repair catalog and begin the repair request process go to Industrialrepairstore.com/ or...
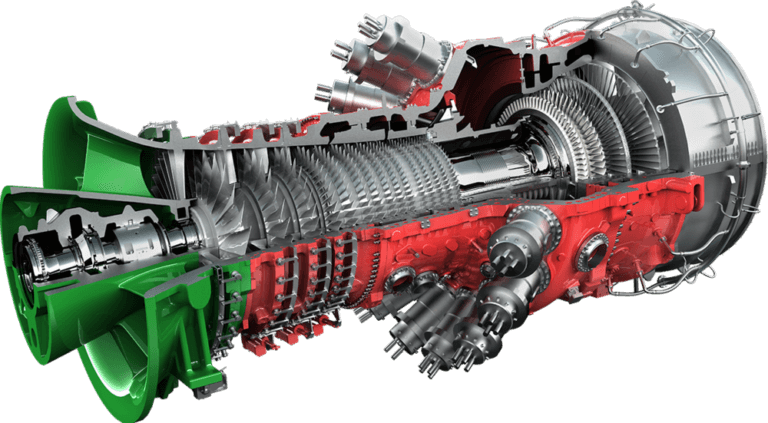
European Project Launches to Demonstrate High-Volume Hydrogen Gas Turbine Combustion
The design of the FLEX4H2 combustor will be based on Ansaldo’s Constant Pressure Sequential Combustion (CPSC) technology, a second-generation combustion system developed for Ansaldo’s flagship GT36 H-class gas turbine (760-MW in combined cycle) combustors. Sequential...

3 Steps to Improve Manufacturers’ Optimism Amid an Economic Downturn
While there is little manufacturers can do about the economy, there are steps they can take to boost confidence. By Jerry Murphy, partner-in-charge of manufacturing and distribution services, Sikich It’s no surprise, in the midst of an economic downturn, optimism in...

John Deere Collaborates with Microsoft to Bring New Value and Efficiencies to John Deere Dealers
MOLINE, IL (January 18, 2023) – John Deere is launching a new dealer business system using Microsoft Dynamics 365. The system will provide a common technology platform for many aspects of a dealer’s business, enabling new opportunities for growth, innovation, and...

RaiBo: A Versatile Robo-Dog That Runs Through a Sandy Beach at 3 Meters Per Second
A research team led by Professor Hwangbo Jemin of the KAIST Department of Mechanical Engineering has developed a quadrupedal robot control technology that can walk robustly with agility even in deformable terrain such as a sandy beach. Professor Hwangbo's research...